|
|
Perceptive Hysteresis Thresholding |
|
|
|
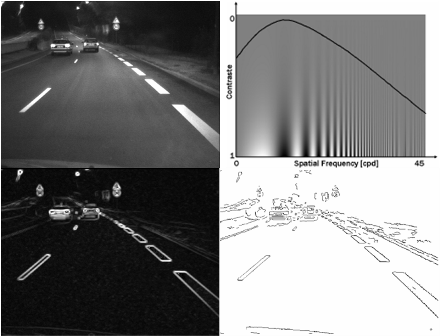
| To develop driving assistance systems which alert the driver in case of inadequate speed according to the visibility conditions, it is necessary to have descriptors of the driver visibility and in particular to detect the visible features in the image grabbed by the camera. In this aim, an hysteresis filter is proposed, which is based on the Visibility Level (VL) rather than on the gradient magnitude of edges. First, edges are extracted. Second, to compute the VL of the edges, a threshold function is computed according to the optical characteristics of the sensor and a Contrast Sensitivity Function of the Human Visual System. Then, the DCT coefficients of each 8 ? 8 block are computed. For each block, the maximum ratio between a DCT coefficient of the block and the corresponding coefficient of the previous threshold function is computed to determine its VL. Then, hysteresis filter is performed on VL values along edges which leads to a perceptual hysteresis thresholding. Some guidelines to set the thresholds are indicated. Results are given on images grabbed onboard a vehicle. Finally, different techniques to use this hysteresis thresholding in the domain of driving assistances are proposed.
|
|
Publications- Hautière, N., Tarel, J.-P. and Brémond, R. Perceptual Hysteresis Thresholding: Towards Driver Visibility Descriptors. In IEEE International Conference on Intelligent Computer Communication
and Processing (ICCP'07), Cluj Napoca, Romania, pages 89-96, 2007.
 
|
|
| Slides |
|
| Related topics
|

|
