|
|
Quasi-dense Road Scene Reconstruction |
|
|
|
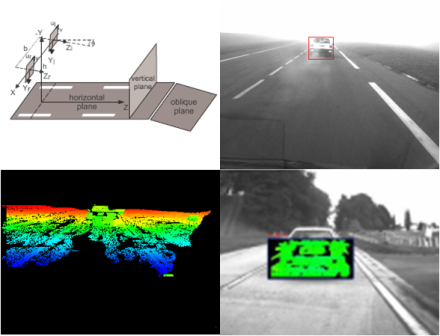
| A stereovision method is presented in this paper, to compute reliable and quasi-dense disparity maps of road scenes using in-vehicle cameras. It combines the advantages of the "v-disparity" approach and a quasi-dense matching algorithm. In this aim, road surface and vertical planes of the scene are first extracted using the sparse "v-disparity" approach. The knowledge of these global surfaces of the scene is then used to guide a quasi-dense matching algorithm and to propagate disparity information on horizontal edges. Both algorithms are presented and compared. Then, our approach is presented and examples of quasi-dense disparity maps are given. Finally, the efficiency of the method is illustrated by the accurate positioning of a bounding box around a vehicle in a bad contrasted video sequence. |
|
Publications- Hautière, N., Labayrade, R., Perrollaz, M. and Aubert, D. Road Scene Analysis by Stereovision: a Robust and Quasi-Dense Approach. In IEEE International Conference on Control Automation Robotics and
Vision (ICARCV06), Singapore, 2006.
  - Perrollaz, M., Labayrade, R., Royère, C. and Hautière, N. a. D. Long Range Obstacle Detection Using Laser Scanner And Stereovision. In IEEE Intelligent Vehicles Symposium (IV'06), Tokyo, Japan, pages 182-187, 2006.
|
|
| Slides |
|
| Related topics
|

|