|
|
Vehicle Attitude Estimation by Multisensor Fusion |
|
|
|
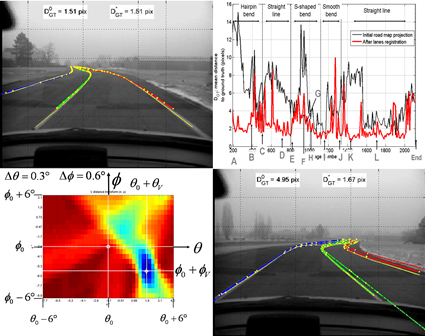
| We investigate the scenario of a vehicle equipped with a camera and a GPS driving on a road whose 3D map is
known. We focus on the case of a road under fog or/and snow conditions. The GPS is used to estimate the vehicle pose and yaw and then the 3D road map is projected onto the camera image. The vehicle pitch and roll angles are then refined by fitting the projected road to detected road markings. Finally,
we discuss the pros and cons of the obtained road registrations in the images and of the vehicle pitch-roll estimates, with respect to the vehicle dynamics and the driving environment, in adverse weather conditions. |
|
Publications- Belaroussi, R., Tarel, J.-P and Hautière, N. Vehicle Attitude Registration using a Camera, a GPS and a 3D Map. In IEEE Intelligent Vehicles Symposium (IV'11), Baden Baden, Germany, 2011.
 
|
|
| Related topics
|

|