|
|
CSF-based Detection and Visibility of Edges |
|
|
|
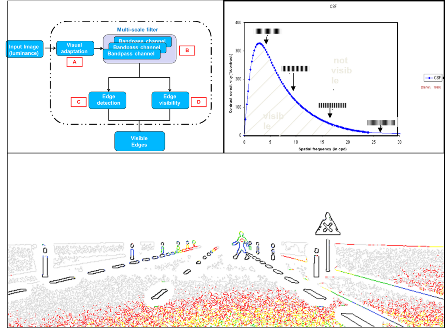
| Automotive lighting systems are designed in order to provide the driver enough visibility, day and night, whatever the weather. In road lighting practice, an object of a fixed size in a simple scene is considered as visible if the contrast between its luminance and its background luminance is higher than a threshold contrast. This ratio is denoted VL (Visibility Level). We propose a framework in order to compute the VL of objects in the road scene from an onboard camera sensor. This framework simulates edge detection by the Human Visual System in an image of the scene. Applications are proposed for automotive lighting system evaluation. |
|
Publications- Joulan, K., Hautière, N. and Brémond, R. Contrast sensitivity functions for road visibility estimation on
digital images. In 27th Session of the CIE (CIE'11), South Africa, 2011.
 - Joulan, K., Hautière, N. and Brémond, R. A unified CSF-based framework for edge detection and edge visibility. In Workshop on Biologically-Consistent Vision (WBCV'11), IEEE Computer
Vision and Pattern Recognition Workshops, Colorado Springs, USA, 2011.

|
|
| Slides |
|
| Related topics
|

|