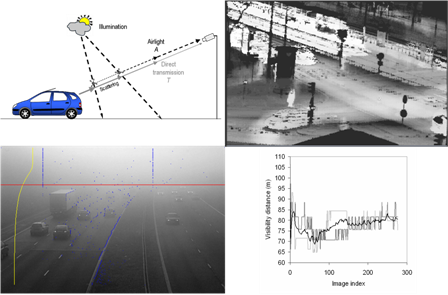
| Based on a road meteorology standard, we present a roadside camera-based system able to detect daytime fog and to estimate the visibility range. Two detection algorithms, both based on a daytime fog model, are presented along with a process to combine their outputs. Unlike previous methods, the system takes into account the 3-D scene structure and filters the moving objects from the region of interest through use of a background modelling approach and detects the cause of the visibility reduction. The study of the system accuracy with respect to the camera characteristics leads to a specification of the characteristics of the camera required for the system. Some results obtained using a reduced-scale prototyping of the system are presented. Finally, an outlook to future works is given.
|
Publications- Hautière, N. and Lepert, P. DIVAS : comment adapter dynamiquement la demande à loffre de sécurité
routière. In Prévention des Risques et Aides à la Conduite, Paris, France, 2010.
 - Hautière, N., Bossu, J., Bigorgne, E., Hiblot, N., Boubezoul,
A., Lusetti, B. and Aubert, D. Sensing the visibility range at low cost in the SAFESPOT road-side
unit. In ITS World Congress (ITS'09), Stockholm, Sweden, 2009.
- Hautière, N., Bigorgne, E. and Aubert, D. Daytime Visibility Range Monitoring through use of a Roadside Camera. In IEEE Intelligent Vehicles Symposium (IV'08), Delft, The Netherlands, 2008.

|