Les études
de visibilité routière en situation de conduite utilisant
des images de synthèse offrent de nombreux avantages par rapport
aux essais sur piste ou sur route (reproductibilité des essais,
absence de risque). Mais la richesse de l’environnement visuel
de l’usager de la route dépasse largement les capacités
matérielles des dispositifs de visualisation (dynamique de
luminance, domaine de couleur, quantification, résolution).
Pour une scène de conduite diurne, la luminance peut atteindre
100000 cd/m². Pour une scène de conduite nocturne, la
luminance peut descendre jusqu'à 0.001 cd/m² et en même
temps valloir 100000 cd/m², en présence des feux de croisements.
Un écran [LCD] ne peut généralement pas afficher
de luminance inférieure à 0.1 cd/m² et supérieure
200 cd/m². Un projecteur [CRT], principalement utilisé
par les simulateurs de conduite, offrent une dynamique encore plus
faible. Selon la taille de la zone de projection, la luminance maximale
affichable est de l'odrede 10 cd/m². Pour contourner ces contraintes,
il existe des algorithmes de reproduction de tons (Tone Mapping) qui
transposent, en utilisant les caractéristiques de la perception
visuelle humaine, une image à forte dynamique de luminances
(HDR), calculées et/ou mesurées, en une image à
luminances affichables.
Le problème
de la reproduction des luminances sur un dispositif d’affichage
limité en niveaux de luminance ou en dynamique n’est
pas récent. Les premiers à s’être intéressé
à cette question sont les photographes qui traitaient les photos
de manière à ce qu’elles correspondent plus à
l’apparence visuelle des scènes photographiées.
Pour les images de synthèses de nombreux opérateurs
[TM] ont été proposés.
Il existe deux catégories d’opérateurs. La première
regroupe les opérateurs globaux ou spatialement uniforme. L’image
est considérée dans son ensemble et tous les pixels
subissent la même transformation. La seconde regroupe les opérateurs
locaux qui appliquent des transformations différentes aux différentes
parties de l’image. Des opérateurs proposent également
une solution dynamique.
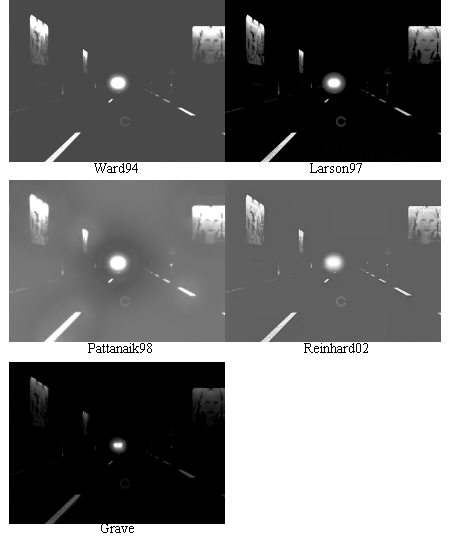
Pour illustrer
le problème du choix d'un opérateur, trois images représentant
trois scènes de conduite sont traitées par 5 opérateurs
de reproduction de tons différents. L'image en haut à
gauche est traitée par l'opérateur linéaire de
[Ward], celle en haut à droite
par l'opérateur global de [Larson
et al.], celle au milieu à gauche par l'opérateur
local de [Pattanaik et al.] et celle
au milieu à droite par l'opérateur local de [Reinhard
et al.] et celle en bas par l'opérateur que j'ai développé
au LCPC.
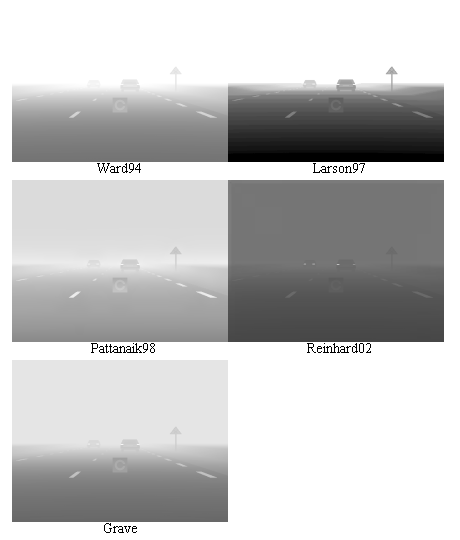
-
Scène
de conduite de jour par temps de brouillard: Cette image
a une dynamique de luminance de 12:1 mais des luminances maximale
et minimale élevées Lwmin = 113,18 cd/m² et
Lwmax = 1392 cd/m². Elle a des fréquences spatiales
faibles et des grandes zones de degradés de luminance.
Cette image pose problème en particulier aux opérateurs
rehausseurs de contraste qui ont du mal à gérer
les dégradés de luminance. D'autres algorithmes
peuvent être génés par une luminance minimale
élevée et rabaisser la luminosité de la scène
en changeant l'ambiance lumineuse.
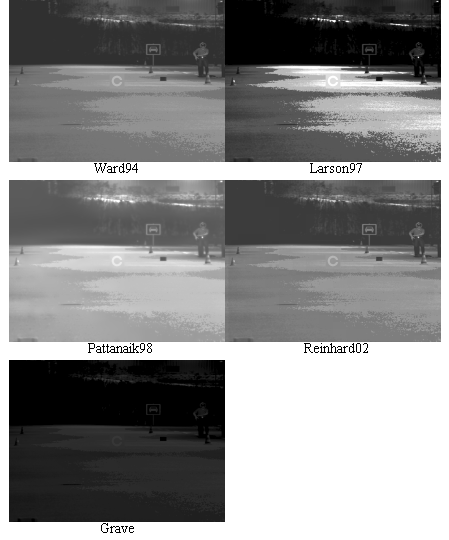
-
Scène
de nuit sans source lumineuse directe: Cette image a
une dynamique de luminance de 20:1 et des luminances maximale
et minimale faibles Lwmin = 0,25cd/m²
et Lwmax = 5,1 cd/m².
Cette image est critique parce que les luminances sont situées
dans le domaine mésopique uniquement. Sa luminance minimale
est inférieur à la plupart des luminances minimales
affichables de la plupart des écrans. Les contrastes pour
de faibles niveaux de luminances sont rapidement écrasés
par la quantification. Les opérateurs ont généralement
tendance à élever les niveaux lumineux pour permettre
de conserver les contrastes et la luminosité est alors
nettement augmentée. La situation de nuit tend alors à
apparaitre comme une situation de jour.
-
Scène
de nuit avec des sources lumineuses dans le champ visuel:
Cette image a une forte dynamique de luminance de 1000:1 et une
luminance maximale élevée (les sources lumineuses)
et une luminance minimale faible Lwmin = 0,5 cd/m²
et Lwmax = 478,4cd/m².
Cette image pose problème parce que la dynamique doit être
compressée sans écraser les contrastes des zones
sombres, tout en préservant une luminosité faible.