Publications- Charbonnier, P., Muzet, V., Nicolle, P., Hautière, N. a. J.-P. and Aubert, D. Stereovision applied to road scene analysis. In Bulletin des Laboratoires des Ponts et Chaussées, 272: 57-74, 2008.
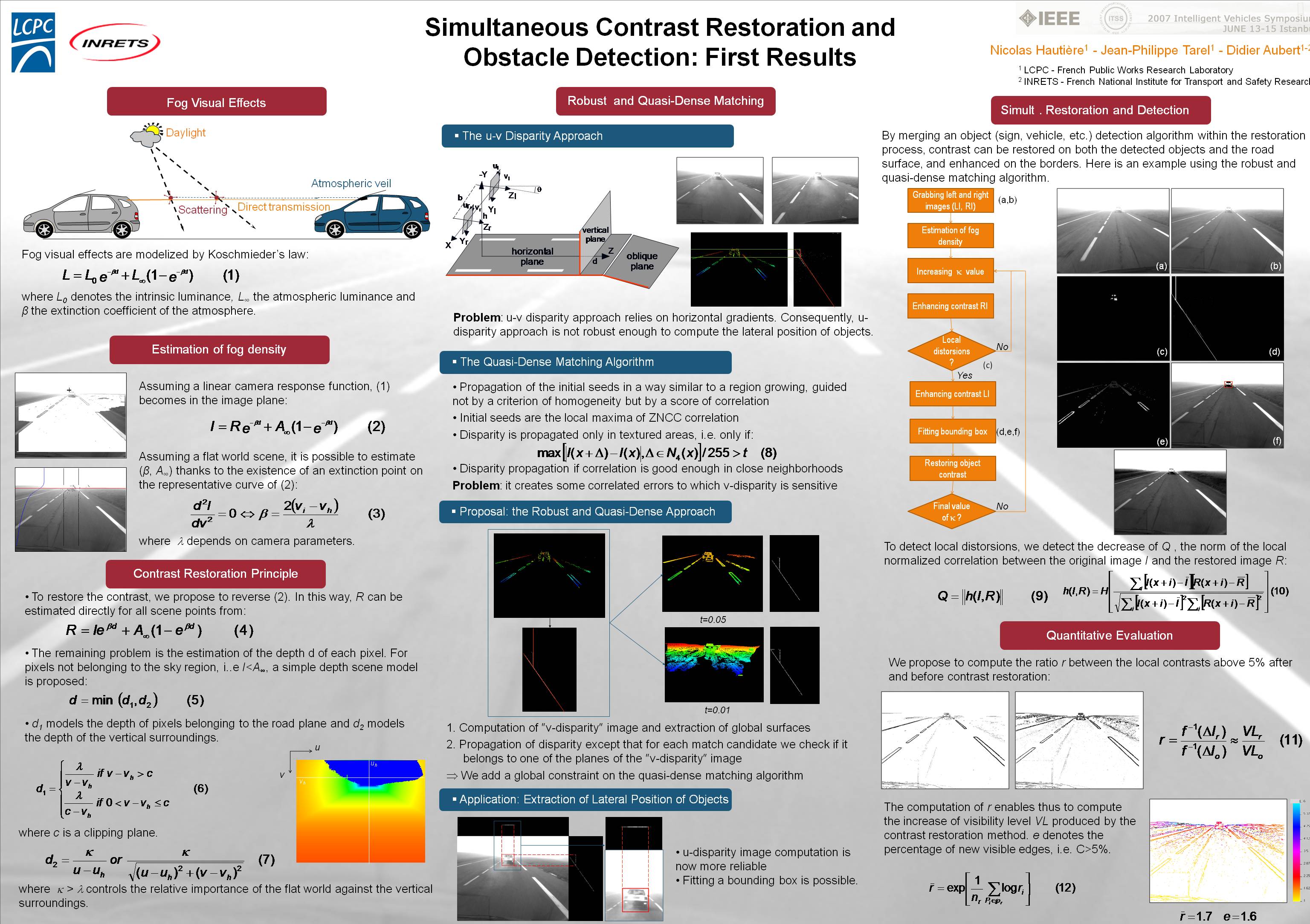
  - Hautière, N., Tarel, J.-P. and Aubert, D. Simultaneous Contrast Restoration and Obstacles Detection: First
Results. In IEEE Intelligent Vehicles Symposium (IV'07), Istanbul, Turkey, pages 130-135, 2007.
 - Hautière, N., Labayrade, R., Perrollaz, M. and Aubert, D. Road Scene Analysis by Stereovision: a Robust and Quasi-Dense Approach. In IEEE International Conference on Control Automation Robotics and
Vision (ICARCV06), Singapore, 2006.
- Perrollaz, M., Labayrade, R., Royère, C. and Hautière, N. a. D. Long Range Obstacle Detection Using Laser Scanner And Stereovision. In IEEE Intelligent Vehicles Symposium (IV'06), Tokyo, Japan, pages 182-187, 2006.
|