|
|
Autonomous Vehicles |
|
|
|
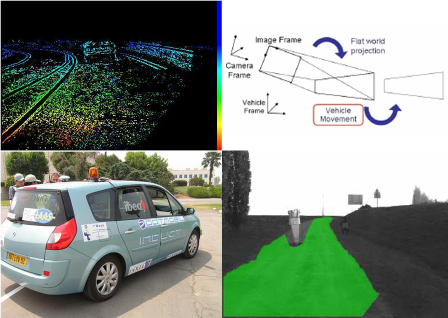
| The perception of the environment is a fundamental task for autonomous robots. Unfortunately, the performances of the vision systems are drastically altered in presence of bad weather, especially fog. Indeed, due to the scattering of light by atmospheric particles, the quality of the light signal is reduced, compared to what it is in clean air. Detecting and quantifying these degradations, even identifying their causes, should make it possible to estimate the operating range of the vision systems and thus constitute a kind of self-diagnosis system. In parallel, it should be possible to adapt the operation of the sensors, to improve the quality of the signal and to dynamically adjust the operation range of the associated processings. First, we introduce some knowledge about atmospheric optics and study the behavior of existing exteroceptive sensors in scattering media. Second, we explain how existing perception systems can be used and cooperate to derive some descriptors of the visibility conditions. In particular, we show how to detect fog presence and to estimate the visibility range. Once weather conditions have been determined, they can be exploited to reduce the impact of adverse weather conditions on the operation of vision systems. We propose thus different solutions to enhance the performances of vision algorithms under foggy weather. |
|
Publications- Hautière, N., Tarel, J.-P. and Aubert, D. Free Space Detection for Autonomous Navigation in Daytime Foggy Weather. In IAPR Conference on Machine Vision Applications (MVA'09), Yokohama,
Japan, 2009.
 - Hautière, N., Labayrade, R., Boussard, C., Tarel, J.-P. and Aubert, D. Autonomous Robots Research Advances.
 - Boussard, C., Hautière, N. and d'Andréa-Novel, B. Vision Guided by Vehicle Dynamics for Onboard Estimation of the Visibility
Range. In IFAC Symposium on Intelligent Autonomous Vehicles, Toulouse, France, 2007.
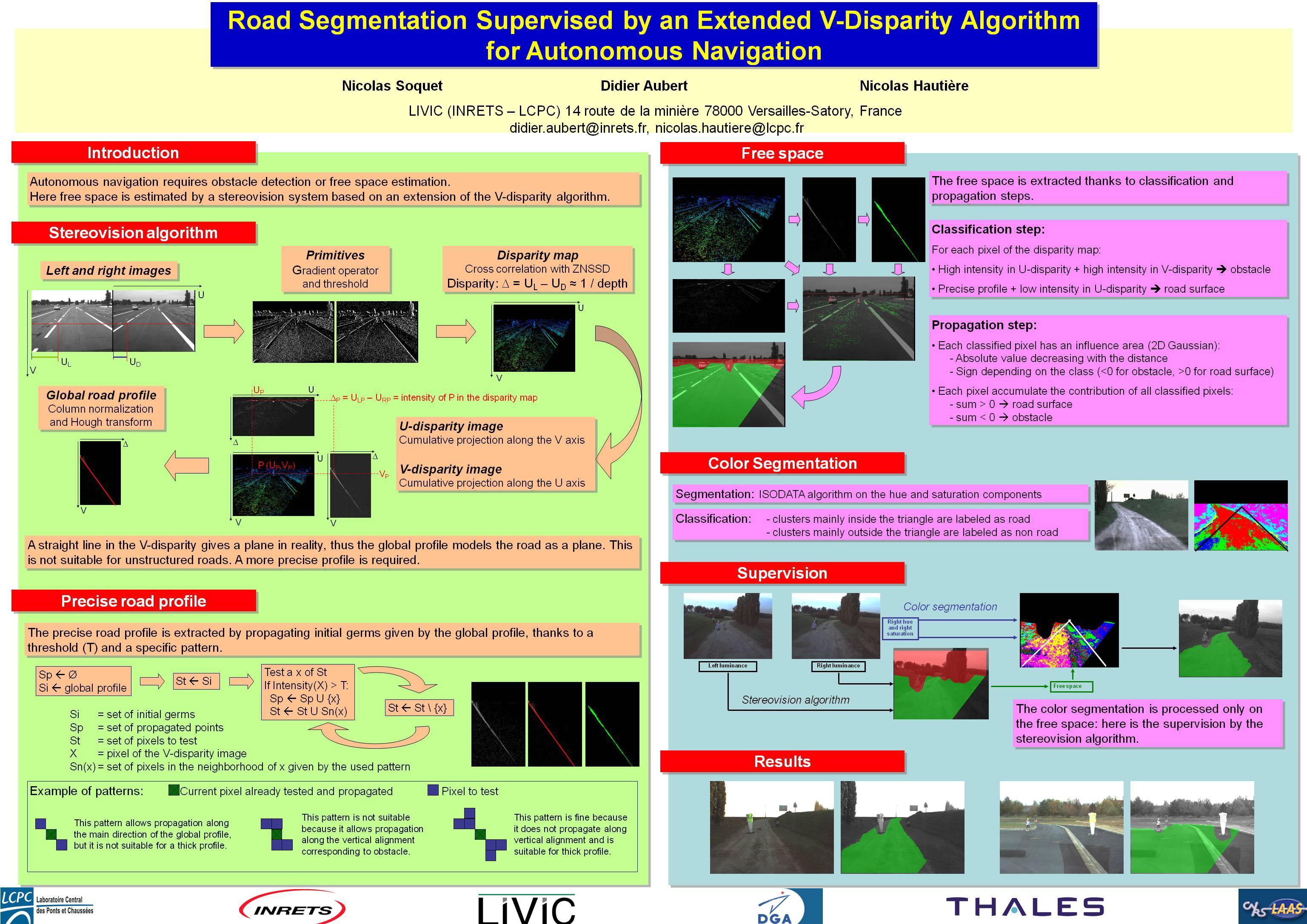
- Soquet, N., Aubert, D. and Hautière, N. Road Segmentation by an Extended V-Disparity Algorithm for Autonomous
Navigation. In IEEE Intelligent Vehicles Symposium (IV'07), Istanbul, Turkey, 2007.

|
|
| Posters |
|
| Related topics
|

|