Publications- Charbonnier, P., Muzet, V., Nicolle, P., Hautière, N. a. J.-P. and Aubert, D. Stereovision applied to road scene analysis. In Bulletin des Laboratoires des Ponts et Chaussées, 272: 57-74, 2008.
  - Hautière, N., Aubert, D. and Jourlin, M. Mesure du contraste local dans les images, application à la mesure
de distance de visibilité par caméra embarquée. In Traitement du Signal, 23 (2): 145-158, 2006.
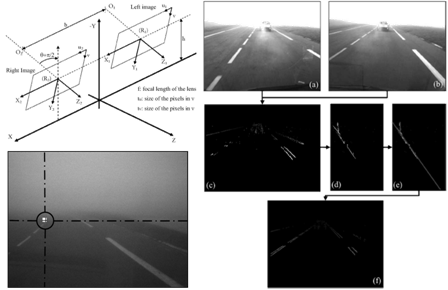
 - Hautière, N., Labayrade, R. and Aubert, D. Estimation of the Visibility Distance by Stereovision: a Generic
Approach. In IEICE Transactions on Information and Systems, E89-D (7): 2084-2091, 2006.
- Hautière, N., Labayrade, R. and Aubert, D. Real-Time Disparity Contrast Combination for Onboard Estimation
of the Visibility Distance. In IEEE Transactions on Intelligent Transportation Systems, 7 (2): 201-212, 2006.
- Hautière, N., Labayrade, R. and Aubert, D. Estimation of the Visibility Distance by Stereovision: a Generic
Approach. In IAPR Congress on Machine Vision Applications (MVA'05),
Tsukuba, Japan, pages 590-593, 2005.
|