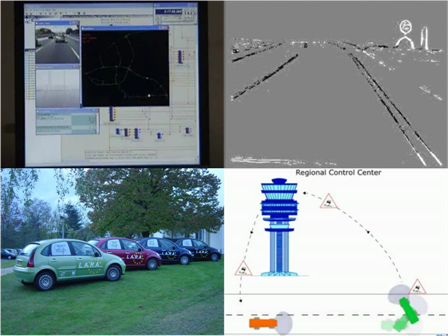
| Within the framework of the European project REACT, we have developed a visibility sensor. One goal of the project is to make progress in road safety with vehicle-to infrastructure (V2I) communications. The vehicle is seen like a sensor, inserted into the traffic, which communicates measurements to a traffic management regional center. In this paper, our objective is to be able to locally measure the visibility range with an onboard camera, in the aim of pursuing low visibility conditions owed by climatic factors. Our approach consists in estimating the range to the most distant object belonging to the plane of the road having at least 5% of contrast. The originality of this approach lies in the fact that the depth map of the vehicle environment is obtained by aligning the road plane in the successive images. This algorithm exploits the dynamics of the vehicle which is given or observed by proprioceptive sensors. |
Publications- Boussard, C., Hautière, N. and d'Andréa-Novel, B. Visibility Distance Estimation based on Structure from Motion. In IEEE International Conference on Control Automation Robotics and
Vision (ICARCV10), Singapore, pages 1416 -1421, 2010.
  - Boussard, C., Hautière, N. and d'Andréa-Novel, B. Vehicle Dynamics Estimation for Camera-based Visibility Distance
Estimation. In IEEE/RSJ International Conference on Intelligent RObots and Systems
(IROS'08), Nice, France, 2008.
- Boussard, C., Hautière, N. and d'Andréa-Novel, B. Vision Guided by Vehicle Dynamics for Onboard Estimation of the Visibility
Range. In IFAC Symposium on Intelligent Autonomous Vehicles, Toulouse, France, 2007.
- Boussard, C., Hautière, N. and Gruyer, D. Prototypage d'un capteur monoculaire générique de visibilité pour
véhicule traceur. In MajecSTIC 2006, Lorient, France, 2006.
|