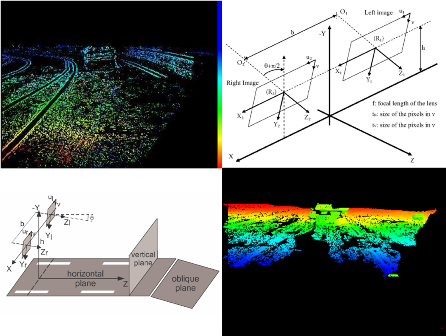
| The reconstruction by 3D stereo have experienced considerable development over the past two decades. Their scope extends the non-destructive to the Virtual Reality, through remote sensing. After recalling the basic principles of these methods, we offer here a presentation of stereovision appllications in the field of road scene analysis. The applications concern, on the one hand, driver assistances, autonomous navigation and, on the other hand, road furniture management and road safety studies.
|
Publications- Charbonnier, P., Muzet, V., Nicolle, P., Hautière, N. a. J.-P. and Aubert, D. Stereovision applied to road scene analysis. In Bulletin des Laboratoires des Ponts et Chaussées, 272: 57-74, 2008.
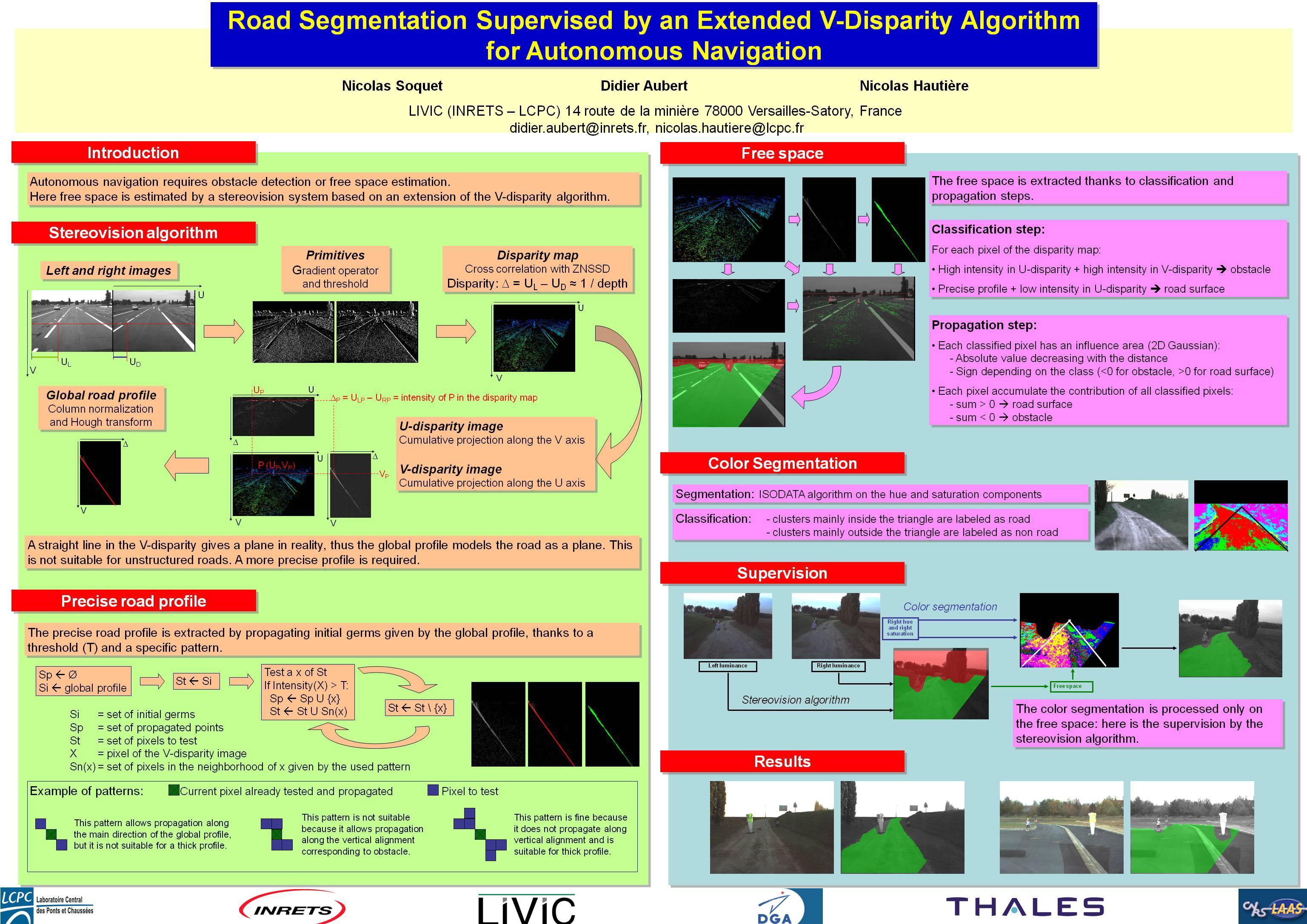
  - Soquet, N., Aubert, D. and Hautière, N. Road Segmentation by an Extended V-Disparity Algorithm for Autonomous
Navigation. In IEEE Intelligent Vehicles Symposium (IV'07), Istanbul, Turkey, 2007.
 - Hautière, N., Labayrade, R. and Aubert, D. Estimation of the Visibility Distance by Stereovision: a Generic
Approach. In IEICE Transactions on Information and Systems, E89-D (7): 2084-2091, 2006.
- Hautière, N., Labayrade, R. and Aubert, D. Real-Time Disparity Contrast Combination for Onboard Estimation
of the Visibility Distance. In IEEE Transactions on Intelligent Transportation Systems, 7 (2): 201-212, 2006.
- Hautière, N., Labayrade, R., Perrollaz, M. and Aubert, D. Road Scene Analysis by Stereovision: a Robust and Quasi-Dense Approach. In IEEE International Conference on Control Automation Robotics and
Vision (ICARCV06), Singapore, 2006.
- Perrollaz, M., Labayrade, R., Royère, C. and Hautière, N. a. D. Long Range Obstacle Detection Using Laser Scanner And Stereovision. In IEEE Intelligent Vehicles Symposium (IV'06), Tokyo, Japan, pages 182-187, 2006.
- Hautière, N., Labayrade, R. and Aubert, D. Detection of Visibility Conditions through use of Onboard Cameras. In IEEE Intelligent Vehicles Symposium (IV'2005), Las Vegas,
USA, pages 193-198, 2005.
- Hautière, N., Labayrade, R. and Aubert, D. Estimation of the Visibility Distance by Stereovision: a Generic
Approach. In IAPR Congress on Machine Vision Applications (MVA'05),
Tsukuba, Japan, pages 590-593, 2005.
|