Publications- Hautière, N., Aubert, D., Dumont, E. and Tarel, J.-P. Experimental Validation of Dedicated Methods to In-Vehicle Estimation
of Atmospheric Visibility. In IEEE Transactions on Instrumentation and Measurement, 57 (10): 2218-2225, 2008.
  - Hautière, N. Artificial Perception under Adverse Conditions: the Case of the Visibility
Range. In Young Researchers Seminar, FERSI FEHRL ECTRI, Brno, Czech Republic, 2007.
- Hautière, N., Aubert, D., Dumont, E. and Tarel, J.-P. Validation expérimentale de méthodes dédiées à l'estimation embarquée
de la visibilité atmosphérique. In Journées Sciences de l'Ingénieur, Marne-la-Vallée, France, 2006.
- Hautière, N., Aubert, D. and Jourlin, M. Mesure du contraste local dans les images, application à la mesure
de distance de visibilité par caméra embarquée. In Traitement du Signal, 23 (2): 145-158, 2006.
- Hautière, N., Labayrade, R. and Aubert, D. Estimation of the Visibility Distance by Stereovision: a Generic
Approach. In IEICE Transactions on Information and Systems, E89-D (7): 2084-2091, 2006.
 - Hautière, N., Labayrade, R. and Aubert, D. Real-Time Disparity Contrast Combination for Onboard Estimation
of the Visibility Distance. In IEEE Transactions on Intelligent Transportation Systems, 7 (2): 201-212, 2006.
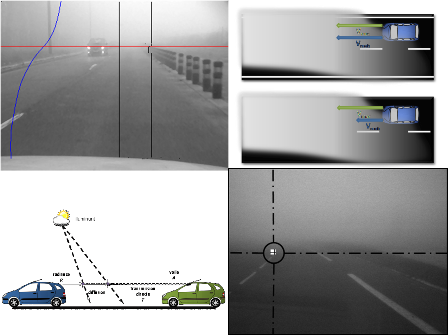
- Hautière, N., Tarel, J.-P., Lavenant, J. and Aubert, D. Automatic Fog Detection and Estimation of Visibility Distance
through use of an Onboard Camera. In Machine Vision and Applications Journal, 17 (1): 8-20, 2006.
- Hautière, N., Aubert, D. and Jourlin, M. Détection des conditions de visibilité et estimation de la distance
de visibilité par vision embarquée. In MajecSTIC 2005, Rennes, France, 2005.
- Hautière, N., Labayrade, R. and Aubert, D. Detection of Visibility Conditions through use of Onboard Cameras. In IEEE Intelligent Vehicles Symposium (IV'2005), Las Vegas,
USA, pages 193-198, 2005.
- Hautière, N., Labayrade, R. and Aubert, D. Estimation of the Visibility Distance by Stereovision: a Generic
Approach. In IAPR Congress on Machine Vision Applications (MVA'05),
Tsukuba, Japan, pages 590-593, 2005.
- Hautière, N. and Aubert, D. Fog Detection through use of a CCD Onboard Camera. In Ingénieurs de l'automobile, 773: 83-86, 2004.
- Hautière, N. and Aubert, D. Driving Assistance: Automatic Fog Detection and Measure
of the Visibility Distance. In ITS World Congress (ITS'03), Madrid, Spain, 2003.
|