Publications- Hautière, N., Tarel, J.-P. and Aubert, D. Mitigation of Visibility Loss for Advanced Camera based Driver Assistances. In IEEE Transactions on Intelligent Transportation Systems, 11 (2): 474-484, 2010.
  - Tarel, J.-P., Hautière, N., Cord, A. and Gruyer, D. a. H. Improved Visibility of Road Scene Images under Heterogeneous Fog. In IEEE Intelligent Vehicle Symposium (IV'10), San Diego, California,
USA, pages 478-485, 2010.
- Hautière, N., Tarel, J.-P. and Aubert, D. Free Space Detection for Autonomous Navigation in Daytime Foggy Weather. In IAPR Conference on Machine Vision Applications (MVA'09), Yokohama,
Japan, 2009.
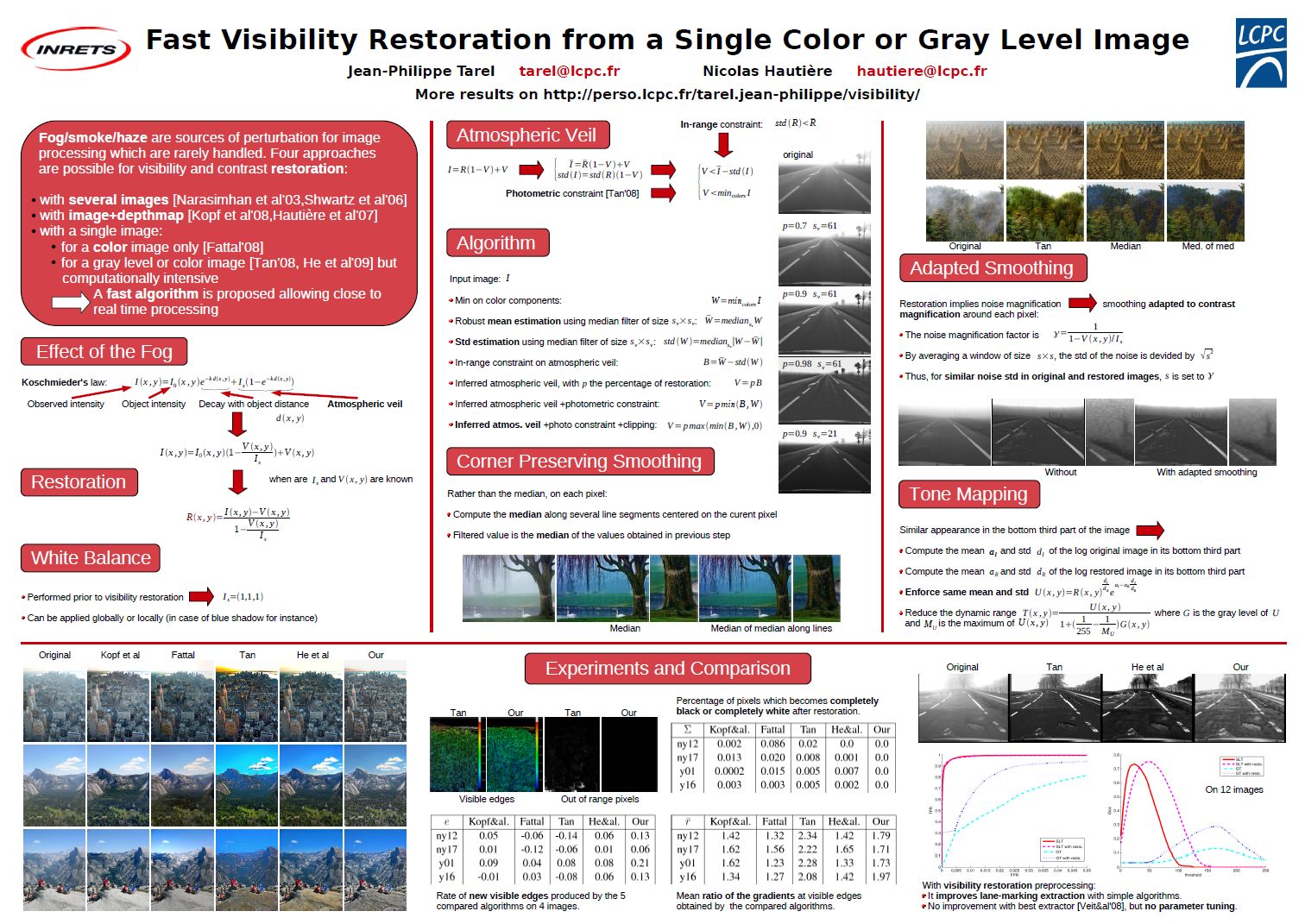
- Tarel, J.-P. and Hautière, N. Fast Visibility Restoration from a Single Color or Gray Level Image. In IEEE International Conference on Computer Vision (ICCV'09), Kyoto,
Japan, pages 2201-2208, 2009.
- Hautière, N., Tarel, J.-P., Aubert, D. and Dumont, E. Blind Contrast Enhancement Assessment by Gradient Ratioing at Visible
Edges. In Image Analysis and Stereology, 27 (2): 87-95, 2008.
 - Hautière, N., Tarel, J.-P. and Aubert, D. Simultaneous Contrast Restoration and Obstacles Detection: First
Results. In IEEE Intelligent Vehicles Symposium (IV'07), Istanbul, Turkey, pages 130-135, 2007.
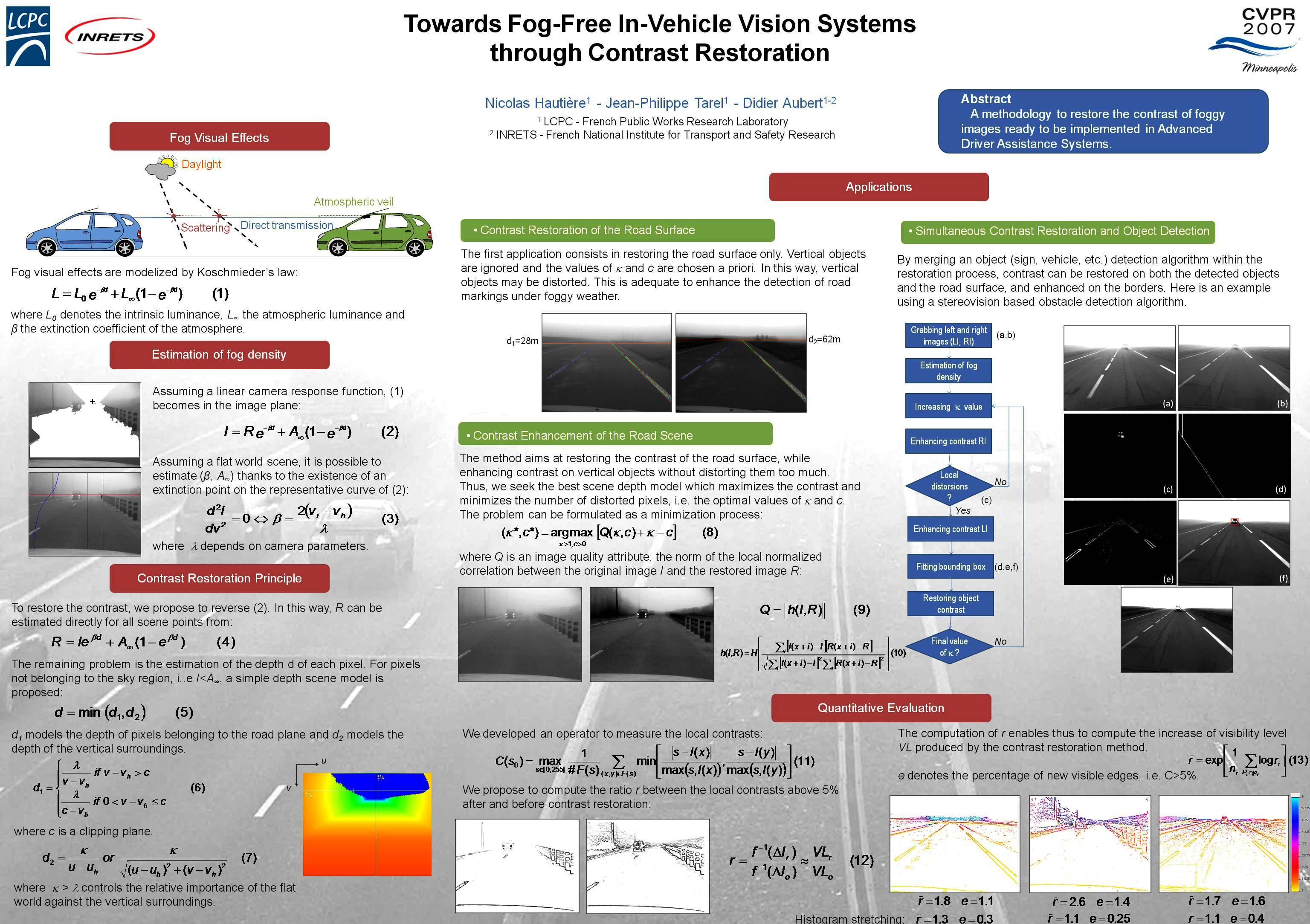
- Hautière, N., Tarel, J.-P. and Aubert, D. Towards Fog-Free In-Vehicle Vision Systems through Contrast Restoration. In IEEE International Conference on Computer Vision and Pattern Recognition
(CVPR'07), Minneapolis, USA, 2007.
- Hautière, N., Tarel, J.-P., Aubert, D. and Dumont, E. Blind Contrast Restoration Assessment by Gradient Ratioing at Visible
Edges. In International Congress for Stereology (ICS'07), Saint-Etienne, France, 2007.
- Hautière, N. and Aubert, D. Contrast Restoration of Foggy Images through use of an Onboard
Camera. In IEEE Conference on Intelligent Transportation Systems (ITSC'05),
Vienna, Austria, pages 1090-1095, 2005.
|